

Yeah. I don't think the steering wheel angle calibration matters. It's going to be the same on the CAN regardless of the rack ratio.Can someone post a link to this thread and actually I think maybe I need to code the DsC module settings from M3.
It is how it's interpreted by DCS and FRM that matters.
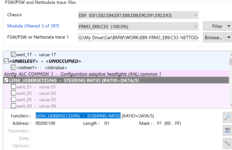
I can see in NCS Dummy, that FRM has the setting for that:
LENK_UEBERSETZUNG - STEERING RATIO. I still have stock setting.
All these option are set to 16, so a custom field needs to be created and set to 12.5. Times 5 and in hex is 3F.
Btw, there are some other cool settings for headlight. E.g. MAX_SW_SCHWENK_W_AUSSEN - HEADLIGHTS MAXIMUM SWIVELLING ANGLE TO OUTSIDE [ANGLE_°=DATA/10] Max is 15deg, but could be increased to 25deg with custom data. I looked inside the headlight housing and I think they can rotate much more than 15deg.
For the blinkers there seems to be a separate setting. LENKWINKEL_UEBERSCHREITEN
Even stock I thought they turn off too late, so I want to play with that.
I reduced off-angle threshold LENKWINKEL_UEBERSCHREITEN from 30.1deg to 23.8deg and I think LENKWINKEL_UNTERSCHREITEN needs to be less than that.
The cornering light threshold can also be adjusted. ABBL_LZ_STAND
For DSC, it's not as straightforward it seems. M1 has different DSC firmware, based on what I see in NCS Dummy. MK60_M82.C01
For my firmware (MK60_87.C0F), there is:
C0F_LENKWINKELKENNLINIE - STEERING ANGLE CHARACTERISTIC CURVE but it only can be changed between non-M cars. It's more of Active Steering, I think.
There are other thresholds though, that you could adust for oversteer and understeer, but it's not clear how this works. Also there is yaw moment compensation in mm. I have no idea what it is.
Anyway, I have not noticed any difference in traction control operation. Though in theory, I would expect understeer to be detected later and oversteer earlier. But it's not like these things were precise in the first place
")
Attachments

Last edited:






